ASX 7400 Stirring Motor is Not Running
Issue
The stirrer on the ASX-7400 is not working
Environment
- Cetac ASX-7400
Resolution
1. Use C-TERM to manually control the autosampler
Type in command STIRON and STIROFF and see if the stirrer starts up right away.
2. If it does not, one solution is to give the motor a light nudge in the mornings or if it observed that it is losing stirring capability.
Another solution if the stirring speed is currently set in a range of 0-10 is to increase the stirring speed to a speed of 20+. The maximum speed is 35.
3. To determine what the current stir factor speed, type the command GETSSPED into C-TERM.
These will report an output of three numbers separated by commas (Rinse, Standards, Samples) factor of speed of the stir motor.
The accepted return values are between 0-35, if the values are below 10, they may not even activate the stirrer due to the inherent resistance of the setup.
4. The function to set the speed of the stir motor in C-Term is SETSSPD or STIRSP
a) The function SETSSPD to set the speed of the stir motor use the same three variable spaces but separated by -s (r-t-s)
r- placeholder variable for rinse speed, only have an integer value 0-35 here without the r
t- placeholder value for standard tube speed, only have an integer 0 here without the t (Personality dependent for OEM to utilize smart stir for standards)
s- placeholder value for the sample speed, only have an integer value 0-35 here without the s
Example of command to set speed in C-TERM: SETSSPD-20-0-30
b) The function to set the stirrer speed as an integer for all values is STIRSP-s
The function uses s as a placeholder value for an integer between 0-35 if the motor is not spinning consider a value above 10
Example of command to set speed in C-TERM: STIRSP-20
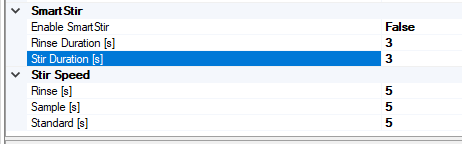
5. If Qtegra and the associated Teledyne ASX-7400 pluging is being used to control the autosampler, then the stirring speed will need to be adjusted in the settings of the ASX-7400 plugin in the Experiment Configuration being used for analysis.
Note: The stirrer needs to be above its 33% speed factor to move well. The motor is not in percents in ASX-Dashboard, but they are in Qtegra. Therefore, set the values in Configurator to something greater than 33 which equates to 33% or more. The Stir Speed settings in Configurator will override any settings written to autosampler using C-TERM
Analysis
By setting it to these higher numbers you can much easier reach the defined total speed as the startup speed is up kicked by a percentage of the total desired movement speed. This will also help with the eccentricity of the motor rotation by completing an orbit and total oscillation cycle around the designated target in a much faster timeframe to further reduce catches on the end of tubes or bending of your stirrer against a misplaced object.
It is after all, increasing its displacement from the target origin by default when it is stirring, to mitigate this a higher speed is recommended to increase the population of safe states over a short period of time at a chance interaction with an obstacle or resistive source. Furthermore, the inertia of the eccentric rotation will help it overcome aspect rotation during an unsafe state period. This is in milliseconds but there is a possibility of having a just-so interaction which triggers the stirrer resistance limits, especially with a collision.
If a collision occurs it will definitely affect the total orbit and oscillations by a sizeable factor, the more unnatural bends to the stirrer the greater the disproportionate unsafe states arise in its total orbit and oscillations about a target point; only further exacerbated by the downward motion in the z-axis as it plunges into solution from its previous stopped location.
Cause
It has been noted by the Cetac engineering team that at a speed of 0-10, the stirrer is unable to beat the neutral resistance of the motor with the paddle and thus is unable to spin up the motor.
Attachment(s)
| File | Last Modified |
|---|---|
| ASX-7400 Configurator Settings.png | August 18, 2022 |